





Altbewährtes, manuelles Kommissionieren
Pick-by-Robot ist eine Komissionierart, bei der das Kommissionieren von Waren durch einen Kommissionierungsroboter durchgeführt wird. Das Handeln von Menschen wird bei dieser Kommissionierart nicht gebraucht.
Wahrnehmungsgesteuerte Logistikroboter oder auch Kommissionierroboter sind weiterentwickelte Formen von autonomen Systemen, die bis dato für den automatisierten Transport von Paletten und/ oder Kisten eingesetzt wurden.
2015 wurde diese Art des Kommissionierens erstmals publik gezeigt. Magazino stellte damals den ersten Roboter des Typs TORU vor.
Die Methode Pick-by-Robot läuft vollständig automatisiert ab. Die Anzahl der gewünschten Objekte wird von einem Kommissionierroboter entnommen. Der Kommissionierroboter erhält dazu vorab die Informationen entweder über ein Lagerverwaltungssystem (WMS) oder per Host (ERP-System). Dazu ist eine stabile WLAN Verbindung notwendig.
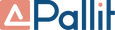
Beispiel des Kommissionierroboters TORU des Magazino Unternehmens:
Der Kommissionierroboter TORU fährt an das gewünschte Regal heran und ergreift den jeweiligen Artikel. Ein Tabett unterstützt diesen Vorgang. Der Roboter verfügt über eine intern integrierte Lagerfläche, auf der er die kommissionierten Artikel ablegt.
In den Greifarmen sind außerdem 2D- und 3D-Kameras angebracht, damit der Kommissionierroboter auch beim Picken aus einem Karton mit unterschiedlichen Waren, das korrekte Objekt ergreift.
Übrigens: Kommissionierroboter müssen nicht immer mobil sein. Es gibt genauso fest installierte Robotersysteme, denen die Waren mit Hilfe von Fördertechnik entgegenkommt.
Nach aktuellen Erkenntnissen und dem momentanen Stand der Wissenschaft ist die Umsetzung einer rein robotergesteuerten Kommissionierung kaum umsetzbar, da viele Hürden auftauchen. Hier ein paar Beispiele:
Eine Lösung - angepasst an den aktuellen Stand der Wissenschaft - wäre die Kombination aus den Tätigkeiten des Menschen und denen des Roboters. So würde jeder, auf ihn angepasste Teilaufgaben übernehmen. Diese Kombinationen finden zunehmend Anwendung in Produktions- und Montageprozesse: Kollaborative Robotik. Durch das Ausspielen der Stärken von Mensch und Roboter kann ein Optimum erreicht werden, das wirtschaftliche höchst effizient ist.
Übrigens: Als kollaborativer Roboter oder kurz Cobot (aus dem Englischen: collaborative robot) wird ein Industrieroboter bezeichnet, der mit Menschen gemeinsam arbeitet und im Produktionsprozess nicht durch Schutzeinrichtungen von diesen getrennt ist.
















